Les vibrations sont omniprésentes dans nos maisons, nos bureaux et nos laboratoires. Si elles sont parfois utiles, on cherche le plus souvent à les contrôler ou à s’en prémunir. Ce livre présente les bases de la dynamique des structures et de la mécanique des vibrations.

Commande avant 16h,
expédié le jour même (lu. - ve.)

Livraison express sous 48h.
Un erratum est disponible sous la Description et dans l'onglet Documents joints.
Les vibrations sont omniprésentes dans nos maisons, nos bureaux et nos laboratoires. Si elles sont parfois utiles, on cherche le plus souvent à les contrôler ou à s’en prémunir. Ce livre présente les bases de la dynamique des structures et de la mécanique des vibrations. Cette discipline est une des plus réductionnistes qui soit et tout système peut s’analyser comme la combinaison de multiples systèmes masse-ressort-amortisseur. Un long chapitre couvre donc ce système élémentaire en détail (chapitre 2). On combine alors ces composants élémentaires pour former des systèmes discrets plus élaborés ; ceci permet d’introduire la notion de mode propre et de réponse dans la base modale (chapitre 3). Ces notions sont étendues aux structures continues (cordes, barres, poutres, membranes) au chapitre 4. Le traitement analytique de systèmes continus plus complexes demande l’utilisation de la méthode des éléments finis (chapitre 5) ; cette méthode peut, dans le contexte considéré, être vue comme une méthode générale de transformation d’un système dynamique continu en un système dynamique discret auquel les méthodes du chapitre 3 peuvent alors s’appliquer. Conformément à l’esprit de la collection, le livre adopte un ton pédagogique, propose plusieurs exercices et comporte de nombreuses figures.
| Référence : | 2039 |
| Nombre de pages : | 220 |
| Format : | 16x24 cm |
| Reliure : | Broché |
| Rôle | |
|---|---|
| Migeot Jean-Louis | Auteur |
| Kraemer Jean-Christophe | Directeur de Collection |
1 Introduction
1.1 Omniprésentes vibrations
1.2 À propos de ce livre
1.2.1 Plan
1.2.2 Démarche
1.2.3 Figures
1.3 Exercices - Premier énoncé
1.4 Exercices - Solutions
2 Système masse-ressort-amortisseur
2.1 Le système masse-ressort-amortisseur
2.2 Rappel sur les équations différentielles
2.3 Oscillateur libre non amorti
2.4 Oscillateur libre amorti
2.4.1 Amortissement super-critique
2.4.2 Amortissement critique
2.4.3 Amortissement sous-critique
2.4.4 Portrait de phase
2.5 Réponse forcée : généralités
2.6 Réponse harmonique
2.6.1 Régime établi
2.6.2 Régime transitoire
2.7 Transformée de Fourier
2.8 Transformée de Laplace
2.9 Réponse impulsionnelle et intégrale de Duhamel
2.10 Excitation par la base
2.11 Isolation vibratoire
2.11.1 Isolation directe
2.11.2 Isolation inverse
2.12 Deux autres oscillateurs
2.12.1 Circuit électrique RLC
2.12.2 Pendule simple
2.13 Masse, ressort et amortissement
2.13.1 Masse
2.13.2 Ressort
2.13.3 Amortisseur
2.13.4 En conclusion
2.14 Vibrations non-linéaires
2.14.1 Oscillateur de Duffing
2.14.2 Système libre non-amorti
2.14.3 Forçage harmonique
2.14.4 Non-linéarités en dynamique des structures
2.15 Synthèse
2.16 Exercices - Énoncés
2.17 Exercices - Solutions
3 Systèmes discrets à plusieurs degrés de liberté
3.1 Le système à deux degrés de liberté
3.2 Système libre non amorti
3.2.1 Valeurs propres et modes propres
3.2.2 Réponse du système libre non amorti
3.3 Système libre amorti
3.3.1 Fréquences propres
3.3.2 Modes dans l’espace de phase
3.3.3 Diagonalisation de la matrice d’amortissement
3.4 Réponse forcée
3.4.1 Intégration numérique
3.4.2 Projection dans la base modale réelle
3.4.3 Réponse en fréquence
3.5 Amortisseur dynamique accordé
3.6 De deux à n degrés de liberté
3.6.1 Définition des matrices
3.6.2 Système d’équations
3.6.3 Valeurs propres et modes propres
3.6.4 Bilan énergétique
3.6.5 Amortissement modal diagonal
3.7 Fonctions de transfert, impédance et mobilité
3.8 Exercices - Énoncés
3.9 Exercices - Solutions
4 Structures continues
4.1 Cordes
4.1.1 Mise en équation
4.1.2 Onde et propagation
4.1.3 Modes et fréquences propres
4.1.4 Synthèse
4.1.5 Réponse forcée
4.1.6 Pour aller plus loin
4.2 Barres
4.2.1 Mise en équation
4.2.2 Deux types de réflexion
4.2.3 Modes et fréquences propres
4.3 Poutres
4.3.1 Mise en équation
4.3.2 Propagation dispersive
4.3.3 Modes et fréquences propres
4.3.4 Pour aller plus loin
4.4 Membranes
4.4.1 Mise en équation
4.4.2 Membrane rectangulaire
4.4.3 Membrane circulaire
4.5 Basses, moyennes et hautes fréquences
4.6 Conclusions
4.7 Exercices - Énoncés
4.8 Exercices - Solutions
5 Méthode des éléments finis
5.1 Principe de la méthode
5.1.1 Lagrangien d’un solide élastique
5.1.2 Discrétisation
5.1.3 Équations dynamiques du solide discrétisé
5.2 Calcul de modes propres
5.3 Calcul de la réponse dynamique
5.4 Quelques remarques
5.5 Exercices - Énoncés
5.6 Exercices - Solutions
6 Conclusion
Page 77 – Exercice 13
Une partie de l’énoncé n’a pas été correctement imprimée ; voici l’énoncé complet :
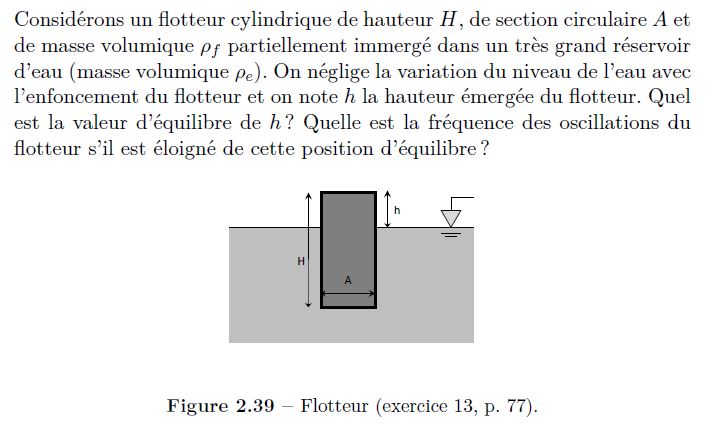
Par ailleurs : 4e ligne de l’énoncé, dernier mot, lire « Quelle » plutôt que « Quel ».
Livres de l'auteur Jean-Louis Migeot
Vous aimerez aussi